< Rotolamento | Indice | Urto tra rotatori: una questione sottile >
La quantitŕ di moto, o momento lineare, racchiude le proprietŕ del moto lineare di un corpo materiale ({$\mathbf p = m\mathbf v$}) o di un sistema di corpi ({$\mathbf P = \sum_j\mathbf p_j$}). Infatti gli effetti dei moti sono proporzionali sia alle velocitŕ dei corpi, sia alle loro masse. La II legge di Newton per un sistema materiale soggetto a forze esterne si esprime come {$\frac {d\mathbf P}{dt} = \mathbf F_e$}, dove a membro destro compare la risultante delle forze esterne agenti sul sistema.
In analogia con questi concetti in questa pagina si introduce il momento angolare, un vettore che svolge lo stesso ruolo del momento lineare nei confronti delle rotazioni dei sistemi. Il ruolo delle forze viene svolto dai momenti torcenti: per far ruotare una porta non basta una porta, ma occorre anche applicarla a una certa distanza dal cardine per dare un braccio alla forza e consentirle di imprimere il moto rotatorio. Lo mostreremo ricavando la II legge per il momento angolare totale del sistema.
Momento Angolare
|
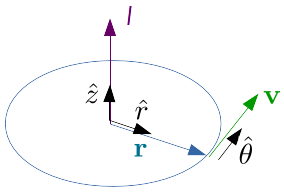
Un corpo di massa {$m$} in moto circolare uniforme su una traiettoria di raggio {$r$}, percorsa con velocitŕ angolare [$\omega$} č contraddistinto da un valore costante della quantitŕ
{$$\mathbf l = \mathbf r \times m \mathbf v$$}
dove {$\mathbf v = \omega r \hat \theta$} č la velocitŕ tangenziale e {$\hat \theta$} č il versore nella direzione tangente al punto {$\mathbf r$} (Fig. 1). I versori {$\hat r$} e {$\hat \theta$} sono mutuamente perpendicolari e il loro prodotto vettoriale identifca la direzione perpendicolare al piano della traiettoria, {$\hat z$}. Quindi il momento angolare giace in quella direzione, nel verso positivo se il moto, visto dalla punta della freccia di {$\hat z$}, č antiorario, nel verso negativo se il moto č orario (regola della mano destra?). Il vettore definito come sopra č chiamato momento della quantitŕ di moto (o momento angolare). In generale l'operazione {$\mathbf r \times \mathbf a$} definisce il momento del vettore {$\mathbf a$}.
Il momento della quantitŕ di moto descrive la rotazione di una massa attorno ad un centro. Questa definizione implica che anche una particella che si muove in linea retta, come quella di Fig. 2, possiede un momento angolare rispetto ad un centro O, se la traiettoria non passa per O. Il caso della traiettoria rettilinea illustra che il modulo del momento angolare č pari al braccio, {$r\sin\theta$} per il modulo del vettore {$mv$}.
Il momento angolare in questo caso č nullo solo se la traiettoria passa per O, ossia il braccio č nullo. L'esempio illustra anche il fatto che il momento angolare č definito rispetto ad un'origine: uno spostamento dell'origine cambia il valore del momento angolare.
Il momento angolare totale di un sistema č la somma dei momenti angolari delle sue masse.
{$$\begin{equation} \mathbf L = \sum_j \mathbf r_j \times m_j \mathbf v_j\end{equation}$$}
Nel caso di un corpo rigido, le cui distanze interne non cambiano durante il moto, le velocitŕ sono funzione di un'unica velocitŕ angolare {$\omega$} comune con cui il corpo ruota attorno ad un preciso asse. Le distanze delle masse da quell'asse definiscono le loro velocitŕ tangenziali {$\mathbf v_j = r_j \omega \hat \theta$}. La stessa distanza {$r_j$} costituisce il braccio della quantitŕ di moto. Di conseguenza la velocitŕ angolare puň essere messa a fattore comune e la costante di proporzionalitŕ con il modulo del momento angolare, per un certo asse di rotazione, č data per un insieme di masse discrete
{$$ L_z = \omega \sum_j m_j r_j^2 = {\cal I} \omega$$}
|
Fig. 1 Moto circolare e momento angolare
Fig. 2 Il momento angolare per una particella che si muove lungo una traiettoria rettilinea č un vettore perpendicolare al piano del disegno, di modulo pari al prodotto di {$mv$} per il braccio {$r\sin\theta$}.
|
La grandezza {$\cal I$} č detta momento d'inerzia. Per un corpo continuo, la distribuzione delle masse, ossia la densitŕ {$\rho(\mathbf r)$}permette di riscrivere la somma come integrale. Se supponiamo a simmetria radialec {$dV(r)$} č il volume della massa a distanza {$r$} dall'asse, risulta che
{$$ L_z = \omega \int_0^r r^2 \rho(r)dV(r) = {\cal I} \omega$$}
Anche il momento d'inerzia, come il momento angolare, dipende dall'asse rispetto al quale si calcola. Il valore di {${\cal I}_O$} per un asse passante per O č messo in relazione al valore di {${\cal I}_{cm}$} per un asse parallelo al precedente e passante per il centro di massa dal Teorema di Huygens-Steiner, o dell'asse parallelo
{$${\cal I}_O = {\cal I}_{cm} + Md^2$$}
dove {$M$} č la massa totale e {$d$} la distanza tra i due assi paralleli.
Indice
Momento di una forza
Il momento di una forza {$\mathbf F$} (o momento torcente, torque in inglese) rispetto ad un polo O č dato dalla stessa operazione definita qui sopra per il calcolo del momento della quantitŕ di moto
{$$ \boldsymbol \tau = \mathbf r \times \mathbf F$$}
ed č perpendicolare al piano definito dai due vettori {$\mathbf r$} e {$\mathbf F$} (lungo {$\hat z$}. Se {$\theta$} č l'angolo tra i due vettori il modulo vale {$\tau_z = r\sin\theta F$}, pari a braccio {$r\sin\theta$} per modulo della forza. Il segno della componente z del momento torcente č dato dalla regola della mano destra?.
Indice
II legge
|
Calcoliamo la derivata della Eq. 1 per un sistema di masse
{$$\begin{equation}\frac d {dt} \sum_j \mathbf r_j \times \mathbf p_j = \sum_j \frac {d\mathbf r_j}{dt} \times \mathbf p_j + \mathbf r_j \times\frac {d\mathbf p_j }{dt} = \mathbf r_j\times \frac {d\mathbf p_j }{dt}\end{equation}$$}
Nel calcolo si č sfruttato il fatto che il primo termine nella sommatoria del membro centrale č sempre nullo, perchč č il prodotto vettoriale tra la velocitŕ e il momento lineare di ciascuna particella e i due vettori sono paralleli tra loro. Il risultato puň essere riscritto tenendo conto della II legge di Newton per {$m_j$}
{$$\frac {d\mathbf p_j }{dt} = \sum_{i\ne j} \mathbf F_{ij} + \mathbf F_{ej}$$}
dove il primo termine a destra rappresenta la risultante di tutte le forze interne (interazioni tra le masse), dovute alle altre masse del sistema e il secondo la risultante delle forze esterne agenti su {$m_j$}.
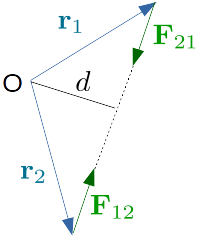
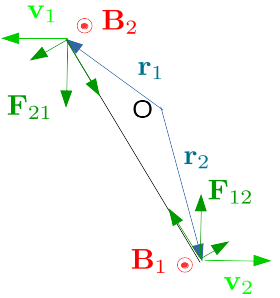
L'Eq. 2 contiene la somma dei momenti di entrambi i termini su tutte le masse del sistema. La somma di tutti i momenti torcenti delle interazioni tra le masse si annulla per forze centrali (dirette come la congiungente delle due masse). Infatti in questo caso le forze condividono il modulo (per il III principio) e il braccio {$d$} (Fig. 3) ed, essendo opposte producono momenti torcenti opposti, che si cancellano a due a due (nella Fig. 4 si mostra un caso in cui questo non č vero per interazioni non centrali). Resta quindo solo la somma dei momenti trocenti di tutte le forze esterne.
Quindi per forze centrali vale che
{$$\begin{equation}\frac {d\mathbf L} {dt} = \sum_j \boldsymbol \tau_{ej}\end{equation}$$}
la derivata della momento angolare totale č uguale alla risultante dei momenti torcenti delle forze esterne agenti sul sistema. Basta quindi che questa risultante sia nulla per garantire la conservazione del momento angolare, ossia il fatto che il momento angolare č costante nel tempo.
|
Fig.3 Per forze centrali i momenti delle coppie di azione ({$\mathbf F_{12}$}) e reazione ({$\mathbf F_{21}$}) si annullano a vicenda. Condividono lo stesso braccio {$d$} e torcono in direzione opposta.
Fig.4 Un caso in cui interazioni non centrali danno momento torcente non nullo: due particelle cariche in moto a velocitŕ {$\mathbf v_1$} e {$\mathbf v_2$}, i campi magnetici prodotti da ciascuna, {$\mathbf B_1$} e {$\mathbf B_2$}, e le forze di Lorentz corrispondenti, {$\mathbf F_{12}= e\mathbf v_2\times\mathbf B_1$} e {$\mathbf F_{21}= e\mathbf v_1\times\mathbf B_2$}. Con la scelta dell'origine i momenti torcenti si sommano lungo l'asse z.
|
Indice
< Rotolamento | Indice | Urto tra rotatori: una questione sottile >