|
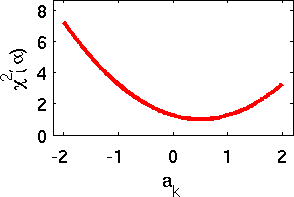
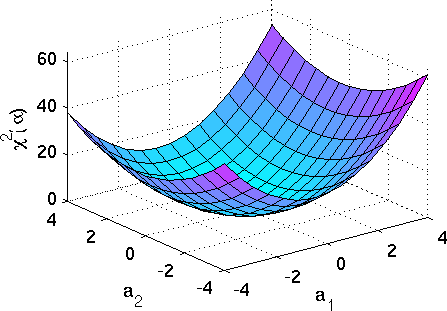
FitPolinomialeErrori< Minimizzazione del chi quadro | Indice | polinomi generalizzati > Matrice di curvatura e matrice degli errori Il significato geometrico della matrice A, appena introdotta (Eq. (6) pagina precedente), diventa evidente se si calcola la curvatura della superficie {$\chi^2(\alpha)$} (ricordiamo che con {$\alpha$} intendiamo l'intero vettore dei parametri). Questa quantitŕ č data dalla derivata seconda di {$\chi^2(\alpha)$} rispetto a coppie di parametri, nello stesso senso in cui {$\frac {d^2f}{dx^2}$} rappresenta la curvatura della funzione f: {$ (1) \qquad\qquad \frac {\partial \chi^2} {\partial a_k a_l} = 2 \sum_{i=1}^N \frac {x_i^k x_i^l} {\sigma_i^2} $} nel cui membro destro si riconosce immediatamente {$2A_kl$} (Eq. (4) e (6) pagina precedente).
Viceversa č un po' piů lungo riconoscere che gli elementi della matrice inversa {$\epsilon=A^{-1}$} danno le correlazioni tra i parametri del fit: {$ (2)\qquad\qquad \epsilon_{kl} = \sigma_{a_k a_l}^2, $} il che giustifica il nome di matrice degli errori dato alla matrice inversa {$\epsilon$}, visto che i suoi elementi diagonali coincidono con le varianze dei singoli parametri. Per ottenere questo risultato occorre calcolare le correlazioni attraverso la propagazione degli errori che stabilisce: {$ (3)\qquad\qquad \sigma_{a_k a_l}^2 = \sum_{i=1}^N \frac {\partial a_k}{\partial y_i} \quad\frac {\partial a_l} {\partial y_i}\quad \sigma_i^2 $} La dipendenza dei parametri da {$y_i$} si ricava a partire dalla soluzione trovata in precedenza, {$\alpha=\epsilon\cdot\beta$}, nella quale solo le componenti del vettore {$\beta$} dipendono da {$y$}, in base a {$\beta_j=[x^jy]$}. Ricordando le definizioni di queste ultime quantitŕ (Eq. (4) pagina precedente), si ha cosě: {$ (4) \qquad\qquad \frac {\partial a_k} {\partial y_i} = \sum_{s=0}^M \epsilon_{ks} \quad\frac {x_i^s} {\sigma_i^2}. $} Dalla sostituzione nella (3) si ottiene infine: {$ (5) \qquad\qquad \sigma_{a_k a_l}^2 = \sum_{i=1}^N \sum_{s=0}^M \epsilon_{ks} \quad\frac {x_i^s} {\sigma_i^2} \sum_{r=0}^M \epsilon_{lr} \quad\frac {x_i^r} {\sigma_i^2}\quad \sigma_i^2, $} e riordinando questa espressione si riconosce al suo interno il termine: {$ \sum_{i=1}^N \frac {x_i^{s+r}} {\sigma_i^2}, $} che coincide con l'elemento di matrice {$A_{rs}$}. In definitiva si ottiene: {$ \sigma_{a_k a_l}^2 = \sum_{s,r=0}^M \epsilon_{ks} \quad \epsilon_{lr} A_{rs} = \epsilon_{kl}, $} dove si č riconosciuto che {$\epsilon\cdot A$} č la matrice unitŕ, ossia solo gli elementi diagonali del prodotto ({$l=s$}, nell'espressione (6)) sono diversi da zero. L'equazione coincide con la (2) e afferma proprio che l'elemento di matrice di {$\epsilon$} fornisce la covarianza tra due parametri; quindi la radice dell'elemento diagonale dŕ la deviazione standard del parametro: {$ (6) \qquad\qquad \sigma_{a_k} = \sqrt{\epsilon_{kk}} $} < Minimizzazione del chi quadro | Indice | polinomi generalizzati > |