< I punti Lagrangiani attorno all'orbita terrestre | Indice | Teorema dell'asse parallelo? >
|
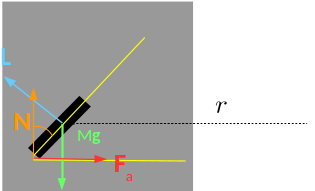
Trattiamo prima un problema piů semplice. Una ruota di massa {$M$} e raggio {$R$} ({${\cal I}=\gamma MR^2,\, \gamma\le1$}), di spessore trascurabile (quindi non ha effetto cono, quello che in inglese si chiama camber thrust) che percorre rotolando in piega una curva di raggio {$r$} a velocitŕ {$v$}. Il centro di massa ({$cm$}) della ruota ha velocitŕ angolare {$\Omega = v/r$} attorno al tracciato e la ruota ha velocitŕ angolare {$\omega=v/R$} attorno al proprio asse.
Le equazioni del moto, referite alla FIg. 1, sono
{$$
\begin{align*}
M\frac{v^2} r &= F_a\\
N &= Mg\\
\frac {dL_z}{dt} &=L_z \Omega = NR\sin\theta -F_a R\cos \theta
\end{align*}$$}
Dato che {$L_z \Omega=\gamma MRv^2/r$}, l'angolo di piega {$\theta$} si ottiene sostituendo le prime due equazioni nella terza e risolvendo {$v^2/gr(\gamma + \cos\theta) =\sin\theta$}. A raggio {$r$} fisso l'angolo cresce con {$v$} fino ad un valore massimo {$\theta_m(v_m,r)$}. Se calcoliamo la forza di primo distacco {$F_{pd}= Mv_m^2/r = \mu_s Mg $} la terza equazione fornisce la velocitŕ massima {$ v_m= \sqrt{gr/\gamma(\sin\theta_m-\mu_s\cos\theta_m)}$}.
|
Fig. 1 Diagramma di corpo libero della ruota in piega
|
Descriveremo ora un modello semplificato di moto (e di bicicletta). PARTE NON TERMINATA, CONTIENE IMPRECISIONI
Quando una moto procede in linea retta possiede un momento angolare {$\mathbf L$} che č in parte dovuto alle ruote e in parte al motore (volano, frizione, albero della distribuzione, ecc.). Nel seguito per semplicitŕ considereremo solo i contributi delle due ruote che si possono scrivere come
{$$ \mathbf {L}_i = {\cal I}_i \omega_i, \quad i=a,p $$}
per la ruota anteriore ({$a$}) e posteriore ({$p$}), e si puň supporre {${\cal I}_i =\gamma_i m_i R_i^2$} dove {$\gamma_i$} sono numeri puri.
|
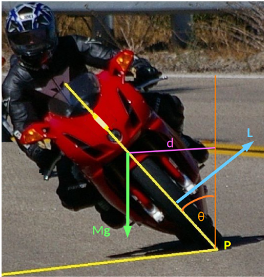
La condotta della moto in curva č dovuta a tre equazioni del tutto simili alle precedenti, riferite ora alla Fig. 2. Solo che ora la massa totale di moto e motociclista, {$M\gg m_a,m_p$}, č molto maggiore delle masse {$m_i$} che contribuisce al momento d'inerzia, che risulta trascurabile in prima approssimazione. Infatti ora {$L_z\Omega=(\gamma_a m_a R_a +\gamma_p m_p R_p)v^2/r$}, e, di conseguenza
Il modulo del momento torcente č dato dal prodotto di {$Mg$} per il braccio {$d=h_{cm}\sin\theta$}, dove {$h_{cm}$} č l'altezza da terra del centro di massa, il punto al quale č applicata la forza di gravitŕ del sistema moto-motociclista. La direzione del momento torcente nell'esempio č uscente dal piano dell'immagine (controllate con la vostra mano destra).
|
Fig.2 Diagramma di corpo libero della moto in piega
|
|
Come nella precessione del momento angolare (il moto della trottola) il momento angolare deve cambiare in base alla II legge riportata sopra, ossia al vettore {$\mathbf L$} della figura va sommato un contributo infinitesimo {$d\mathbf L = \boldsymbol \tau dt$} nella direzione perpendicolare. E l'addizione di un contributo infinitesimo perpendicolare fa sě che il modulo di {$\mathbf L$} non cambi, ma ne cambi la direzione. La punta del vettore descrive un cerchio (il vettore descrive un cono perché la sua componente verticale non cambia).
La Fig. 2 illustra ciň che avviene durante una curva a velocitŕ costante: il modulo del momento angolare non cambia e la sua direzione descrive la superficie laterale di un cono, come predice la II legge.
|
''Fig. 2 direzione del momento angolare delle ruote ai due estremi di una curca circolare.
|
Se il raggio della curva č {$r$} e la velocitŕ di percorrenza {$v=\Omega r$}, come nel caso della precessione il modulo della derivata temporale di {$\mathbf L$} si puň scrivere come {$\Omega L$}, e quindi, in base alla II legge
{$$ \frac {v^2} r \left(\frac{{\cal I}_a} {R_a} + \frac {{\cal I}_p} {R_p} \right) = Mgh_{cm} \sin \theta$$}
< I punti Lagrangiani attorno all'orbita terrestre | Indice | Teorema dell'asse parallelo? >