|
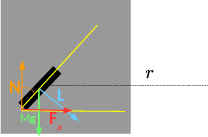
Trattiamo prima un problema piů semplice. Una ruota di massa {$m$} e raggio {$R$} ({${\cal I}=\gamma mR^2,\, \gamma\le1$}), di spessore trascurabile (quindi non ha effetto cono, quello che in inglese si chiama camber thrust) il cui centro di massa percorre rotolando in piega una curva di raggio {$r$} a velocitŕ {$v$}. il punto di contatto P con la strada percorre una circonferenza di raggio{$r^\prime=r+R\sin\theta$} con velocitŕ angolare {$\Omega = v/r^\prime$} e la ruota ha velocitŕ angolare {$\omega=v/R$} attorno al proprio asse. Nel seguito approssimiamo {$r^\prime\approx r$}.
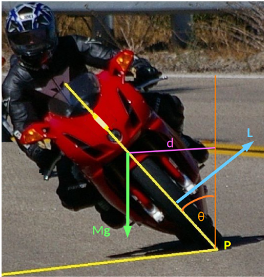
Le equazioni del moto nel sistema di riferimento della strada, Fig. 1 per la ruota e Fig. 2 per la moto, sono le stesse. Qui usiamo la massa totale della moto, chedetermina la velocitŕ massima del problema reale, scrivendo
{$$
\begin{align*}
M\frac{v^2} r &= F_a\\
N &= Mg\\
F_aR\cos\theta &= N R\sin\theta
\end{align*}$$}
dove la prima equazione esprime la forza centripeta risultante e l'ultima impone momento torcente nullo sul centro di massa (rispetto al ribaltamento). D'ora in avanti riserviamo la massa {$M$} alla moto ed {$m$} alle ruote.
Queste equazioni impongono che {$v=\sqrt{gr\tan\theta}$} e che la massima velocitŕ per un dato raggio di curva {$r$} si ottenga per {$\mu=\tan\theta_M $}, che rappresenta la condizione di aderenza minima o di primo distacco e corrisponde all'angolo di piega massimo. Di conseguenza la velocitŕ massima vale {$v_M=\sqrt{\mu g r}$}.
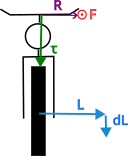
Per piegare la moto occorre una manovre controintuitiva per i principianti, ma automatica per ciclisti e motociclisti, che consiste nel controsterzare all'inizio di ogni curva. La ragione č illustrata in Fig. 2.
La moto č mostrata in assetto verticale, prima della manovra, mentre procede verso l'osservatore, quindi con il momento angolare delle ruote {$L$} verso destra. Una forza uscente applicata al lato destro del manubrio (sinistro per il conducente) a moto ferma la farebbe girare verso sinistra (destra per il conducente). Invece imprime un momento torcente {$\boldsymbol\tau=\mathbf R \times\mathbf F$} e quindi una variazione di momento angolare nella stessa direzione di {$\boldsymbol\tau$}, che lo piega (lo fa precedere) nel verso mostrato in figura. Siccome le forcelle rendono la moto solidale con le ruote, il momento torcente piega la moto verso destra. Questa condizione riproduce quella di Fig. 1 e quindi, senza ulteriori spinte sul manubrio la moto piegata curva verso destra (sinistra per il conducente).
|
Fig. 1 Diagramma di corpo libero della ruota in piega in una curva a sinistra (per il conducente)
Fig.2 Diagramma di corpo libero della moto in piega in una curva a destra.
Fig. 3 Controsterzo
|
|
Durante la curva il momento angolare delle ruote svolge invece un ruolo minore. Vediamolo. Di fatto in un giro completo il loro momento angolare compie una precessione con la stessa velocitŕ angolare della moto. ossia {$\Omega = R/(r+R\sin\theta)\omega\approx R\omega/r$}.
L'equazione della precessione č {$L\Omega = \delta\tau$}, dove ora occorre generare un piccolo momento torcente residuo applicato al centro di massa pari a {$\delta\tau$}, mentre {${\cal I}_m=\gamma m R^2=L/\omega$} č il momento d'inerzia totale delle ruote, di massa complessiva {$m$}, con un fattore numerico {$\gamma$} compreso tra 0 e 1, a seconda che la loro massa sia prevalentemente al centro o sul bordo. Va ricordato perň che {$m\ll M$} circa di un fattore 100, ossia che il momento d'inerzia della moto attorno al punto di contatto P č sicuramente {${\cal I}_M\gt 100 {\cal I}_m$} (la moto con conducente, oltre ad avere massa molto maggiore, é alta e lunga diverse volte il raggio {$R$}).
|
|