|
MotoCircolare< Accelerazione parallela e perpendicolare alla direzione del moto? | Indice | Moto relativo? > Cinematica del Moto Circolare Immaginiamo un punto colorato sul copertone di una ruota di bicicletta, che sta girando attorno all'asse passante per il centro O, fisso. Il punto si muove di moto circolare uniforme: il modulo della sua velocitŕ č costante nel tempo, ma la direzione del vettore velocitŕ cambia ad ogni istante.
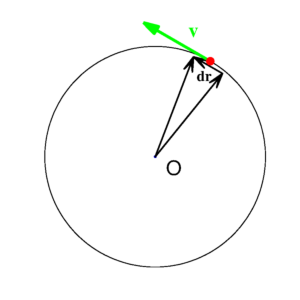
Stabilite le direzioni dei vettori v, tangente alla circonferenza, e a, radiale, diretta verso il centro, calcoliamo ora i moduli dei vettori. Il modulo del vettore velocitŕ, v, rappresenta la derivata rispetto al tempo dello spazio percorso lungo la circonferenza, l=Rθ (questo discende dalla definizione dell'angolo in radianti, che č proprio il rapporto tra l'arco di circonferenza l e il raggio R). Siccome la lunghezza del raggio R č costante, il risultato č {$$\begin{equation} v= R \frac{d\theta}{dt} = R\omega \end{equation} $$} Per calcolare il modulo dell'accelerazione centripeta basta considerare che, mentre r percorre la circonferenza, la punta del vettore velocitŕ tangenziale percorre anch'esso una circonferenza, di raggio v, e spazza angoli θ uguali in tempi uguali. Ossia, in analogia con l'equazione precedente si puň scrivere che il modulo dell'accelerazione centripeta a vale {$$ a= v \frac {d\theta}{dt}=v\omega = R \omega^2 $$} Approfondimento. Queste stesse relazioni possono essere ricavate in modo formale e piů generale come segue. Consideriamo un moto qualunque nel piano (moto vario planare). Il vettore posizione č {$$\begin{equation} {\mathbf r} = r \hat r \end{equation}$$} La posizione varia nel tempo sia perché cambia la lunghezza di r (ciň ovviamente non avviene nel moto circolare), sia perchč cambia la direzione del versore radiale, che puň ruotare attorno all'origine. La sua derivata, il vettore velocitŕ istantanea, contiene quindi due termini {$$ \begin{equation} {\mathbf v} = \frac {dr}{dt} \hat r + r \frac {d \hat r}{dt}\end{equation}$$} Per calcolare la derivata del versore radiale occorre considerare che la punta della freccia del versore si muove lungo la circonferenza di raggio uno, ossia nella direzione del versore tangente, {$\hat \theta$} (da non confondere con l'angolo), in base alla relazione (1), ovvero {$$ \frac {d\hat r}{dt} = 1\cdot \frac {d\theta}{dt} \hat \theta $$} dove 1č il raggio e la derivate dell'angolo rispetto al tempo č la velocitŕ angolare ω. Inserendo questa relazione nell'equazione (3) si ottiene {$$ \begin{equation} {\mathbf v} = \frac {dr}{dt} \hat r + r \frac {d \theta}{dt}\hat \theta \end{equation}$$} Notate ancora che, se il moto č circolare, {$ \frac {dr}{dt} =0$} e l'equazione (4) si riduce a v = Rω nella direzione tangente, risultato giŕ visto sopra. Nel caso generale c'č perň anche una componente radiale della velocitŕ. Si puň poi calcolare l'accelerazione come derivata dell'equazione (4) che ha due fattori nel primo termine e tre nel secondo, quindi, con la regola di derivazione dei prodotti di funzioni, si devono ottenere cinque termini {$$ \begin{equation} {\mathbf a} = \frac {d^2r}{dt^2} \hat r + \frac {dr}{dt} \frac{d \hat r} {dt}+ \frac {dr}{dt} \frac {d \theta}{dt}\hat \theta + r \frac {d ^2\theta}{dt^2}\hat \theta + r \frac{d\theta}{dt}\frac{d\hat \theta}{dt}\end{equation}$$} L'ultimo termine contiene la derivata del versore tangente, che descrive anch'esso, con la sua punta, una circonferenza unitaria definita dallo stesso angolo al centro θ, essendo per definizione perpendicolare al versore radiale, e quindi rigidamente connesso con quest'ultimo. Č quindi evidente che anche per questo moto si puň scrivere, in analogia con la relazione sopra la (4) {$$ \frac {d\hat \theta}{dt} = 1\cdot \frac {d\theta}{dt}(- \hat r)=-\omega\hat r $$} dove il segno meno deriva dal fatto che, nel moto in verso antiorario dei versori radiale e tangenziale, l'incremento di quest'ultimo risulta antiparallelo alla direzione del raggio r. Sostituendo le due derivate dei versori nella (4) si ottiene infine {$$ \begin{equation} {\mathbf a} = \left(\frac {d^2r}{dt^2} - r\omega^2\right) \hat r + \left(2\frac {dr}{dt} \omega+ r \frac {d \omega}{dt}\right)\hat \theta \end{equation}$$} Infine riconosciamo che nel moto circolare il modulo del raggio č r=R, costante, quindi le sue derivate sono nulle, e nel moto circolare uniforme anche la derivata di ω č nulla. In definitiva scompare il termine tangenziale dell'accelerazione e il termine radiale si riduce al suo contributo negativo, Rω2 in modulo. Questo č il risultato ottenuto prima con il semplice ragionamento geometrico. < Accelerazione parallela e perpendicolare alla direzione del moto? | Indice | Moto relativo? > |